كل الدورات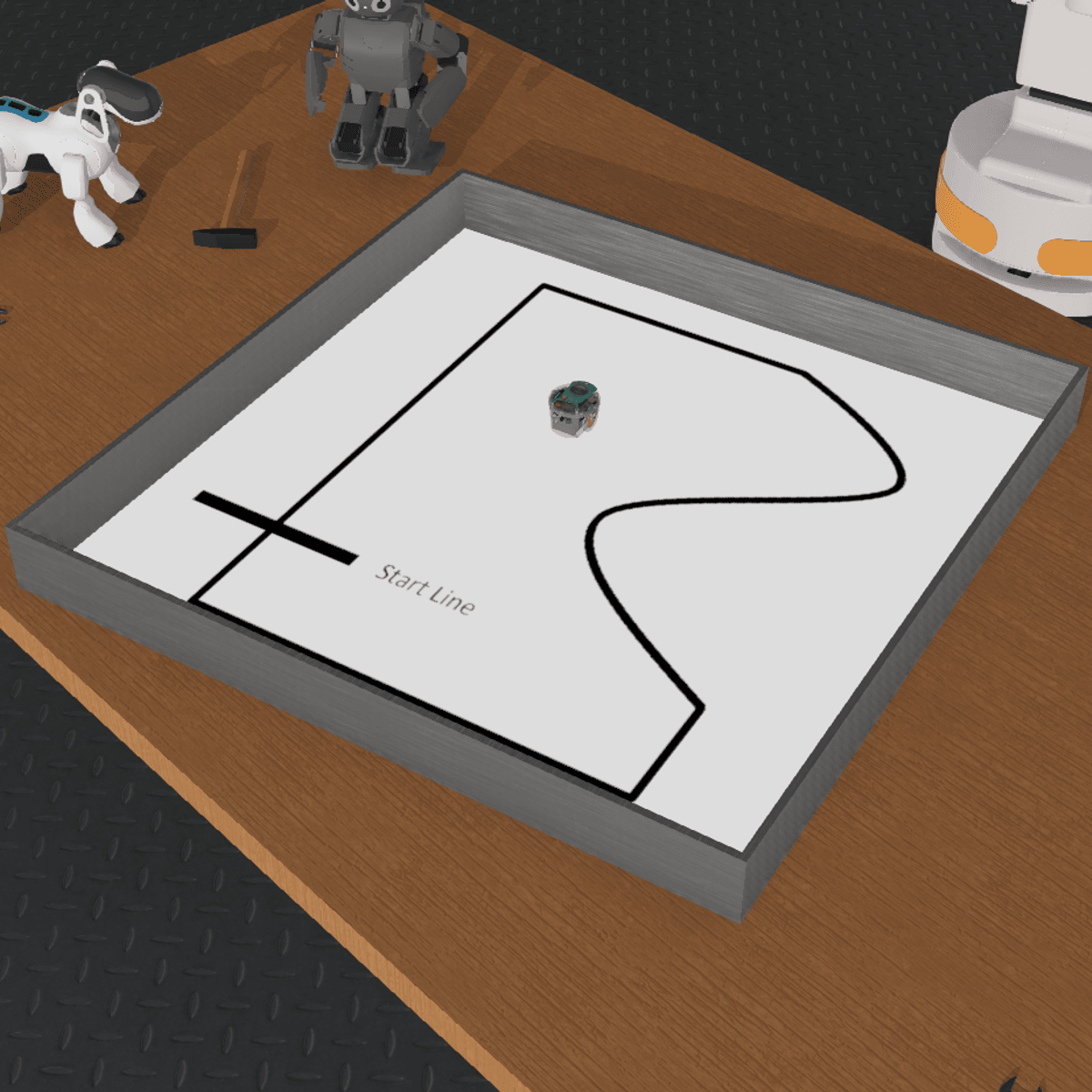
عن الدورة
يُقدم هذا المساق مقدمة شاملة للروبوتات المتنقلة المستقلة، مع التركيز على الميكانيكا الحركية الأمامية (الأودومتري)، وأساسيات المجسات والمحركات، والأساليب التفاعلية البسيطة والتي تشمل تجنب التصادمات واتباع الخطوط. يعتمد المساق على تطبيقات عملية من خلال محاكي فيزيائي واقعي يُدعى “ويبوتس”، حيث يتم التدريب على نمذجة الميكانيكا للأنظمة غير الجامدة، وكذلك استخدام آلات الحالة البسيطة للتحكم. يهدف المساق إلى تمكين المتعلم من فهم أساسيات تحكم الروبوتات والسلوك التفاعلي البسيط من خلال التجربة العملية في بيئة محاكاة.
ماذا ستتعلم
- نمذجة الآليات والمجسات والمحركات في محاكي فيزيائي على الإنترنت
- فهم ضوابط التفاعل المنفصلة والأساسية
- أداء حسابات الميكانيكا الحركية الأمامية للآليات (غير) جامدة
المتطلبات المسبقة
- معرفة أساسية بالبرمجة
- مفاهيم الرياضيات الأساسية
المدرسون
N
Nikolaus Correll
Computer Science
إعلان
إعلان