عن الدورة
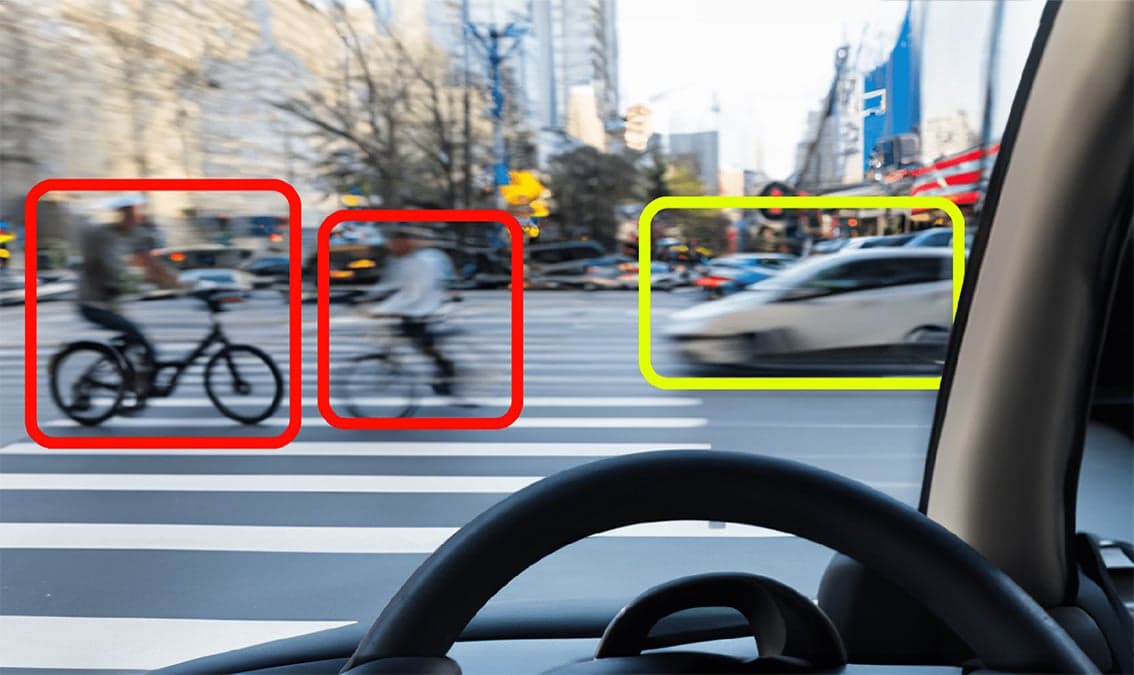
تعتمد المركبات ذاتية القيادة، مثل السيارات ذاتية التشغيل، بشكل حاسم على إدراك دقيق للبيئة المحيطة بها. في هذه الدورة ستتعلّم الأساسيات النظرية والعملية لتتبّع الأجسام المتعددة (Multi-Object Tracking) في الأنظمة السياراتية، وهو عنصر جوهري لفهم ما يحدث حول المركبة واتخاذ قرارات آمنة. تغطي الدورة المكوّنات الأساسية لتتبّع الأهداف المتعددة، بما في ذلك وصف الحساسات الشائعة في المركبات وفهمها، ونماذج الحركة (Motion Models) المستخدمة لتمثيل ديناميكيات الأجسام المتحركة. كما تتناول المبادئ التي تقوم عليها المرشحات (Filters) القادرة على التعامل مع عدد متغير من الأجسام، وهو تحدٍ رئيسي في البيئات الواقعية حيث قد تظهر الأجسام وتختفي أو تتداخل مساراتها. ستتعرّف أيضاً على مجموعة مختارة من أهم مرشحات تتبّع الأجسام المتعددة (MOT Filters) المستخدمة في التطبيقات الحديثة، مع التركيز على كيفية تحديد مواقع عدد غير معروف من الأجسام وما يرافق ذلك من تحديات مثل الربط بين القياسات والأهداف، والتعامل مع الضوضاء وعدم اليقين، وإدارة حالات الولادة/الاختفاء للأهداف. تبني هذه الدورة على المفاهيم والأفكار المقدّمة في مقرر CHM013x: «دمج الحساسات والترشيح غير الخطي للأنظمة السياراتية»، وتوسّعها بشكل خاص نحو تتبّع عدة أهداف. يتركز الاهتمام على الحساسات الأكثر شيوعاً في المركبات: الكاميرات، والماسحات الليزرية (LiDAR/laser scanners)، وحساسات الرادار، وكيفية توظيفها ضمن إطار تتبّع متعدد الأجسام. كما ستكتسب خبرة قيّمة من خلال تنفيذ خوارزميات مختلفة لتتبّع الأجسام المتعددة وتطبيقها على مشكلات عملية.
ماذا ستتعلم
- فهم معمّق لتتبّع الأجسام المتعددة (MOT) والتحديات المرتبطة به
- فهم على مستوى الخبراء للمبادئ والنظرية والخوارزميات في تتبّع الأجسام المتعددة الحديث
- معرفة عملية واسعة لحل مشكلات تتبّع الأجسام المتعددة المختلفة في التطبيقات الواقعية
- خبرة قيّمة من تنفيذ وتطبيق خوارزميات متعددة لتتبّع الأجسام المتعددة
المتطلبات المسبقة
- CHM013x: دمج الحساسات والترشيح غير الخطي للأنظمة السياراتية
المدرسون
Lennart Svensson
Professor
Yuxuan Xia
PhD
Karl Granström
Perception specialist