كل الدورات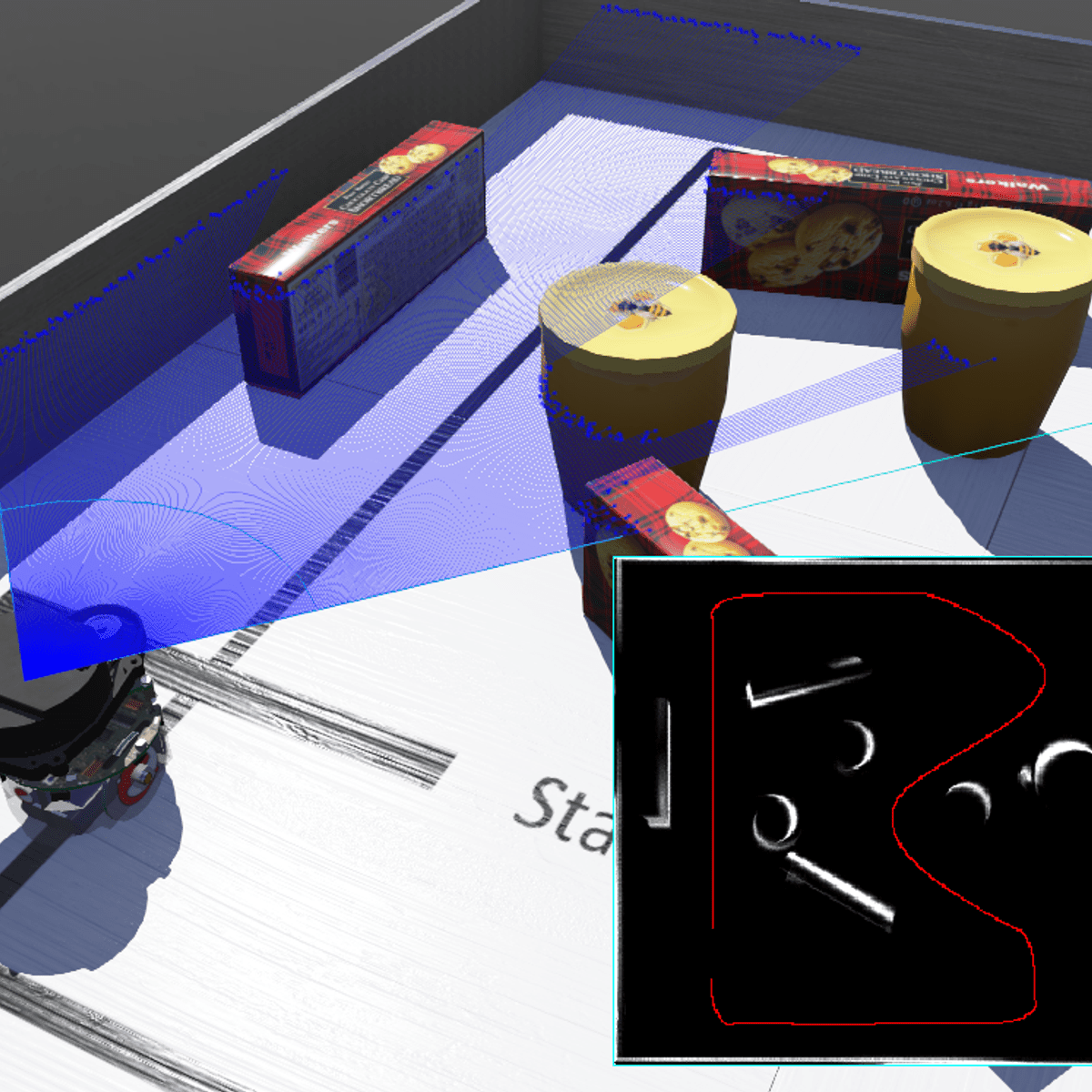
عن الدورة
تعتبر هذه الدورة الثانية في تخصص مقدمة في الروبوتات، وتركز على تعليم كيفية إجراء الكينماتيكا العكسية الأساسية للأنظمة الهولونومية وغير الهولونومية بتقنية التحكم الارتدادي. كما تتناول معالجة إشارات المستشعرات متعددة الأبعاد مثل الماسحات الضوئية الليزرية لتوليد الخرائط. تسلط الدورة الضوء على التعامل مع مصادر عدم التيقن الناجمة عن الميكانيزمات والمستشعرات، وتزوّد المتعلمين بأساليب ونماذج للتحكم والتصميم وفقًا لهذه العوامل.
ماذا ستتعلم
- استخدام تقنيات التحكم الراجعة للكينماتيكا العكسية للأنظمة الهولونومية وغير الهولونومية
- تطبيق التحويلات الإحداثية على إشارات المستشعرات متعددة الأبعاد
- فهم التمثيلات الاحتمالية الأساسية للتعامل مع عدم التيقن الناتج عن ضوضاء القياس
المدرسون
N
Nikolaus Correll
Computer Science
المواضيع
المحاكاة
الروبوتات
برمجة الحاسوب
برمجة بايثون
الخوارزميات
أنظمة التشغيل في الوقت الحقيقي
الجبر الخطي
رسم الخرائط البيانية
معلومات الدورة
المنصةCoursera
المستوىغير محدد
طريقة التعلمغير محدد
السعرمجاني
المهارات
المحاكاة
الروبوتات
برمجة الحاسوب
برمجة بايثون
الخوارزميات
أنظمة التشغيل في الوقت الحقيقي
الجبر الخطي
رسم الخرائط البيانية
إعلان
إعلان