All Courses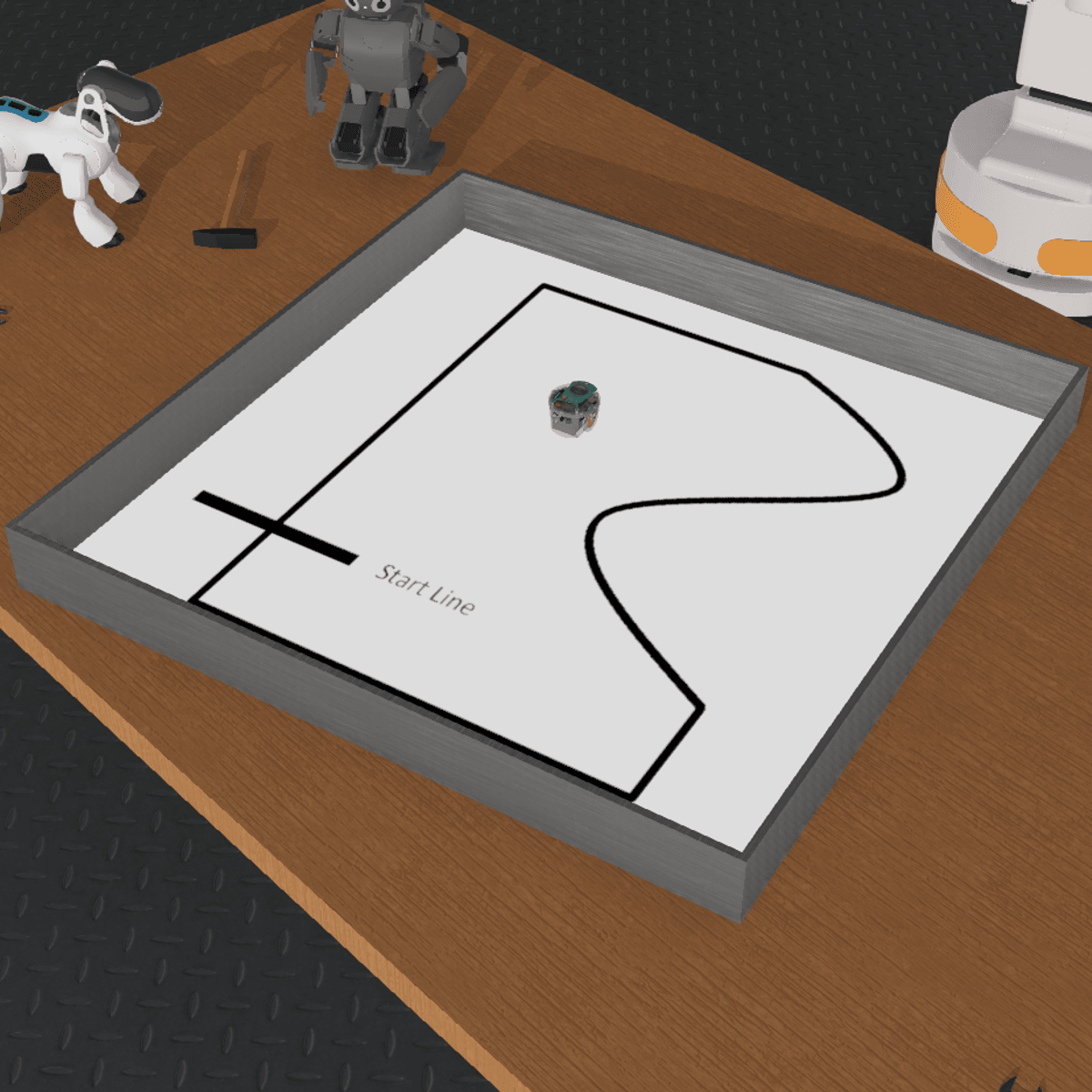
About this Course
"Basic Robotic Behaviors and Odometry" provides you with an introduction to autonomous mobile robots, including forward kinematics (âodometryâ), basic sensors and actuators, and simple reactive behavior. This course is centered around exercises in the realistic, physics-based simulator, âWebotsâ, where you will experiment in a hands-on manner with simple reactive behaviors for collision avoidance and line following, state machines, and basic forward kinematics of non-holonomic systems. An overar
What You'll Learn
- Model mechanisms, sensors, and actuators in a physics-based online simulator
- Understand basic reactive and discrete controllers
- Perform forward kinematics computations for simple (non-)holonomic mechanisms
Prerequisites
- Basic programming knowledge
- Fundamental mathematics concepts
Instructors
N
Nikolaus Correll
Computer Science
Topics
Simulations
Automation
Artificial Intelligence
Algorithms
Python Programming
Simulation and Simulation Software
Linear Algebra
Robotics
Control Systems
Course Info
PlatformCoursera
LevelUnknown
PacingUnknown
PriceFree
Skills
الروبوتات
الذكاء الاصطناعي
الخوارزميات
برمجة بايثون
المحاكاة
أنظمة التحكم
الجبر الخطي
الأتمتة
Control Systems
إعلان
إعلان