All Courses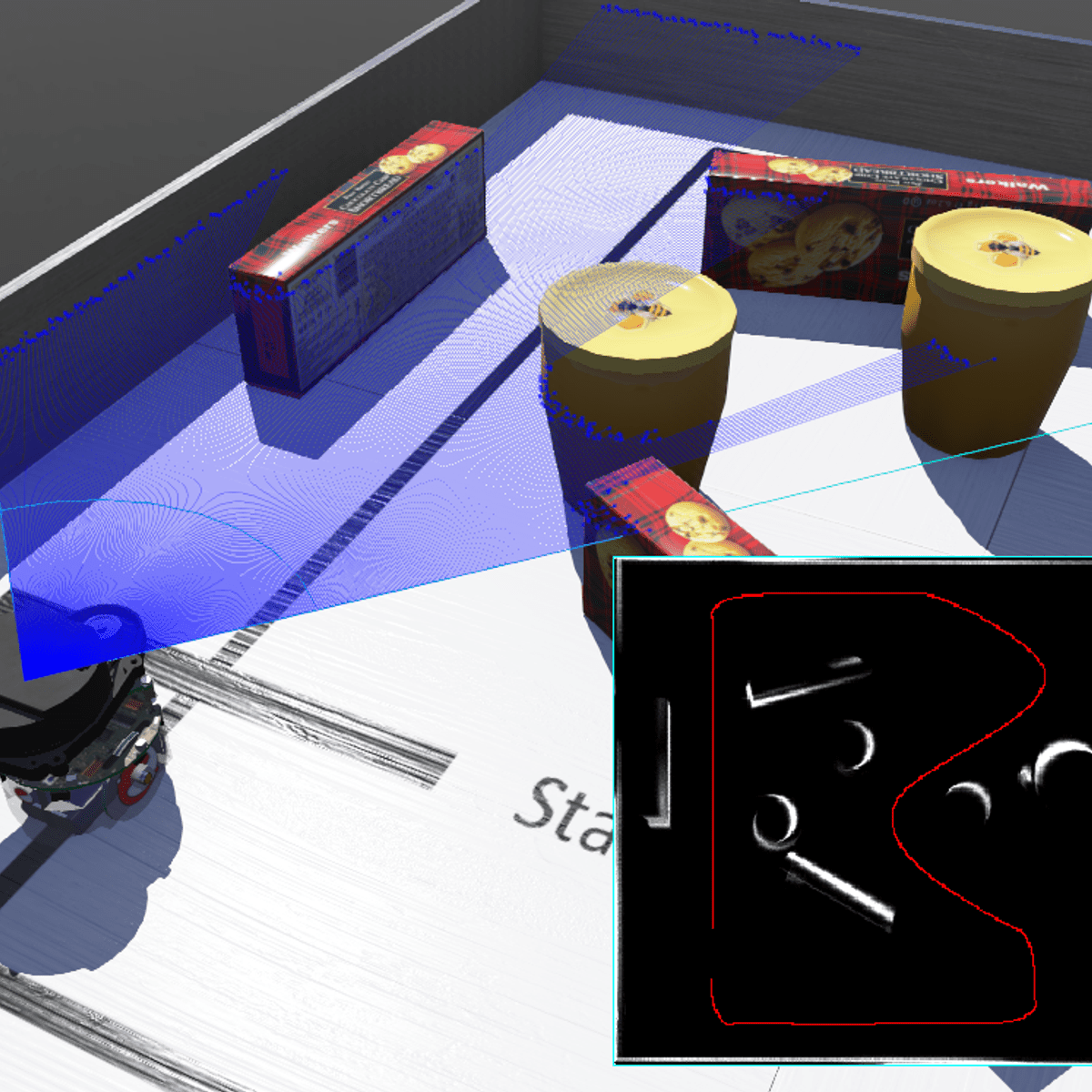
About this Course
In this second course of the Introduction to Robotics specialization, "Robotic Mapping and Trajectory Generation", you will learn how to perform basic inverse kinematics of (non-)holonomic systems using a feedback control approach. You will also learn how to process multi-dimensional sensor signals such as laser range scanners for mapping. Additionally, you will apply the overarching focus of mechanisms and sensors as sources of uncertainty and gain techniques to how to model and control them.
What You'll Learn
- Use basic feedback control techniques for inverse kinematics of (non-)Holonomic mechanisms
- Apply coordinate transforms to multi-dimensional sensor signals
- Understand basic probabilistic representations to deal with uncertainty from measurement noise
Instructors
N
Nikolaus Correll
Computer Science
Topics
Simulations
Robotics
Computer Programming
Python Programming
Algorithms
Real-Time Operating Systems
Linear Algebra
Data Mapping
Course Info
PlatformCoursera
LevelUnknown
PacingUnknown
PriceFree
Skills
المحاكاة
الروبوتات
برمجة الحاسوب
برمجة بايثون
الخوارزميات
أنظمة التشغيل في الوقت الحقيقي
الجبر الخطي
رسم الخرائط البيانية
إعلان
إعلان